Κινητήρας και χωρίς τροχό.
Κινητήρες - δύο από τις εξόδους του EdScratch
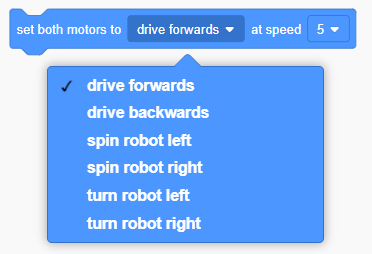
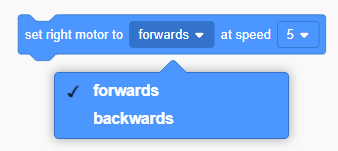
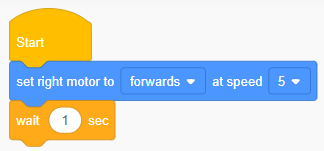
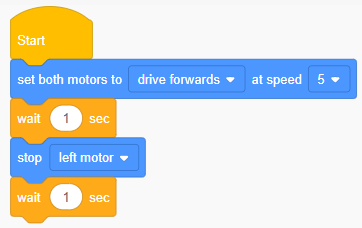
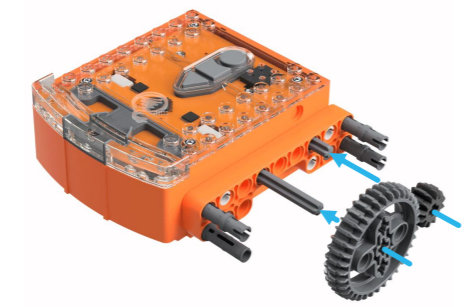
Τα περισσότερα μπλοκ ελέγχουν και τις δύο μηχανές του Edison. Αυτό όμως δε σημαίνει ότι και οι δύο μηχανές κάνουν πάντα το ίδιο πράγμα. Άλλωστε νωρίτερα παρακολουθήσαμε ότι οι μηχανές του Edison στις περιστροφές δεν κάνουν και οι δύο την ίδια κίνηση ταυτόχρονα (π.χ. στην περιστροφή ο ένας κινείται μπροστά ενώ ο άλλος κινείται πίσω). Αυτό σημαίνει ότι μπορείτε να γράψετε ένα πρόγραμμα μετακινώντας μόνο έναν από τους κινητήρες ή να γράψετε ένα πρόγραμμα που να λέει σε κάθε κινητήρα τι να κάνει ξεχωριστά. Φυσικά, μπορούμε και να αφαιρέσουμε τους τροχούς να συνδέσουμε έναν άξονα αντί αυτών. Πάνω σε αυτόν τον άξονα μπορούμε να βάλουμε είτε μια έλικα είτε ένα γρανάζι, μία μπάρα και οτιδήποτε άλλο μας εξυπηρετεί στην κατασκευή που θέλουμε να δημιουργήσουμε. Πώς μπορούμε να ελέγξουμε ξεχωριστά κάθε κινητήρα; Ανοίξτε την εφαρμογή EdScratch και κοιτάξτε την κατηγορία Drive στην παλέτα μπλοκ. Κοιτάξτε τα διάφορα μπλοκ και δείτε αν μπορείτε να ανακαλύψετε μπλοκ που θα μπορούσατε να χρησιμοποιήσετε αν θέλατε μόνο μια έξοδο από έναν από τους κινητήρες του Edison. Είναι εμφανή τα μπλοκ δεξιού και αριστερού κινητήρα αντίστοιχα: Ενώ οι επιλογές αφορούν εμπρόσθια και οπίσθια κίνηση αντίστοιχα. Ερώτηση 1: Προς ποια κατεύθυνση θέλετε να πάει το ρομπότ; Αν κοιτάξουμε προσεκτικά τις παραμέτρους θα δούμε ότι δεν περιέχουν παραμέτρους καθορισμού του ¨μέτρου" της λειτουργίας τους. Μπορούμε να καθορίσουμε το είδος και την ταχύτητα όχι όμως τον χρόνο που θα λειτουργήσουν οι κινητήρες. Αυτό μπορεί να συμβεί με το υπόλοιπο πρόγραμμα που θα γράψουμε. Οι κινητήρες μας θα αρχίσουν να λειτουργούν όταν εκτελεστούν διαδοχικά οι αντίστοιχες εντολές στο πρόγραμμά μας και θα σταματήσουν όταν κάποια άλλη εντολή τους το υπαγορεύσει ή τερματιστεί το πρόγραμμα. Για παράδειγμα, το παρακάτω πρόγραμμα δεν έχει καμία απόκριση καθώς μόλις δίνεται η εντολή εκκίνησης του κινητήρα αυτό .... τερματίζεται. Σε αντίθεση με το επόμενο που λειτουργεί τον δεξί κινητήρα εμπρόσθια για ένα δευτερόλεπτο και μετά τερματίζεται. Μπορείτε να φανταστείτε τι λειτουργία επιτελείται με το παρακάτω πρόγραμμα; Λοιπές εντολές κινητήρων
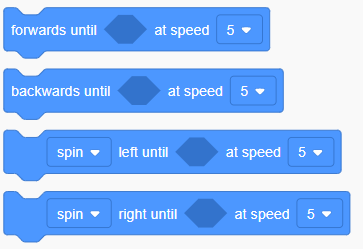
Με αντίστοιχο "περιφερειακά χρονικά ελεγχόμενο" τρόπο λειτουργεί και το μπλοκ ελέγχου και των δύο κινητήρων καθώς είναι εμφανές ότι δεν περιέχει ούτε αυτό παραμέτρους χρόνου λειτουργίας: Τέλος, θα αφήσουμε για επόμενη ενότητα τα μπλοκ κινητήρων που απαιτούν από το Εdison να αισθανθεί το περιβάλλον του και τα οποία σας υπόσχομαι ότι θα σας είναι ιδιαίτερα εύκολα στον χειρισμό, μόλις αποκτήσουμε την εμπειρία των " εντολών αισθητήρων". 

Αν λάβουμε υπόψη αυτά που γράψαμε στον έλεγχο της στροφής νωρίτερα, θα έπρεπε να περιγράφουν:
Ερώτηση 2: Πόσο μακριά θέλετε να πάει το ρομπότ;
Ερώτηση 3: Ποιες μονάδες χρησιμοποιείτε για τη μέτρηση της απόστασης;
Ερώτηση 4: Πόσο γρήγορα θέλετε να πάει το ρομπότ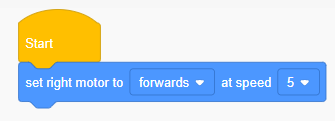
Μια ενδιαφέρουσα κατασκευή που παρουσιάσαμε σε μικρογραφία στην αρχή αυτής της ενότητας είναι ο Γερανός. Σε αυτήν ο ένας κινητήρας του Edison χρησιμοποιείται για την περιστροφή του Γερανού ως προς τον άξονα του ενώ ο άλλος σε δεύτερο χρόνο για την ανύψωση του αντικειμένου προς μεταφορά. 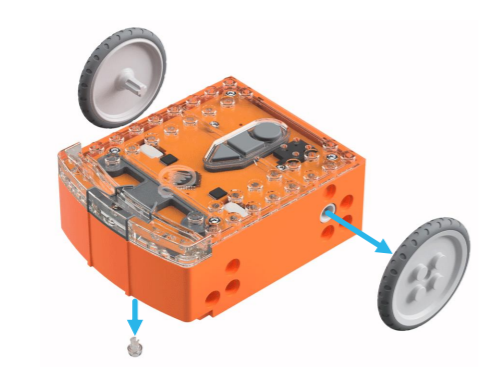


Αυτές οι διαφορετικές λειτουργίες ανοικτού χρόνου θα μας δώσουν περαιτέρω δυνατότητες παραμετροποίησης της λειτουργίας με τη βοήθεια εντολών που θα γνωρίσουμε στη συνέχεια σε επόμενες ενότητες. Έτσι θα εμπλουτίσουμε σημαντικά τη φαρέτρα μας στην προσπάθεια δημιουργίας ρεαλιστικών λειτουργικών κατασκευών αλλά και της ανάπτυξης της υπολογιστικής σκέψης των μαθητών μας.