Κίνηση στη μαύρη γραμμή - line follower
Οι εντολές για την κίνηση στη μαύρη γραμμή
Ένα βασικό πρόβλημα που καλείται να λύσει όποιος ασχολείται με την εκπαιδευτική ρομποτική είναι να θέσει το ρομπότ να κινείται σε μαύρη γραμμή (Line follower). Σε κάθε ρομποτική κατασκευή που ακολουθεί μια μαύρη γραμμή χρειάζεται να υπάρχει αισθητήρας που να βλέπει στην επιφάνεια που κινείται το ρομπότ.
Έχουμε αναφέρει σε προηγούμενο μάθημα ότι η αρχή είναι η εξής: Η σκούρα επιφάνεια απορροφά την ακτινοβολία και το ρομπότ με τους αισθητήρες που έχει από κάτω, "διαβάζει" μεγάλη απόσταση. Μία λευκή επιφάνεια δεν απορροφά ακτινοβολία και το ρομπότ "διαβάζει" μικρή απόσταση.
Ενώ σε άλλες ρομποτικές κατασκευές χρειάζεται να διαχειριστούμε τον αισθητήρα καθώς και την απόσταση που "βλέπει" για να προγραμματίσουμε την κίνηση σε μαύρη γραμμή, στο Edison δίνεται έτοιμη η εντολή αυτή. Επιπλέον, στις παρακάτω εντολές για την κίνηση εμπεριέχεται η λογική της επαναληπτικής δομής.
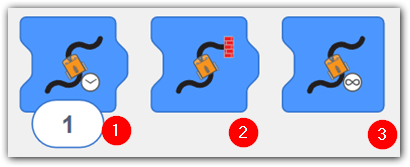
1η εντολή: Ακολούθησε τη γραμμή για 1 δευτερόλεπτο (επανάληψη ορισμένες φορές- που καθορίζονται από τα δευτερόλεπτα).
2η εντολή: Ακολούθησε τη γραμμή μέχρι το ρομπότ να ανιχνεύσει ένα εμπόδιο (επανάληψη μέχρι να ικανοποιηθεί μια συνθήκη).
3η εντολή: Ακολούθησε τη γραμμή για πάντα (επανάληψη για πάντα).
Παραδείγματα
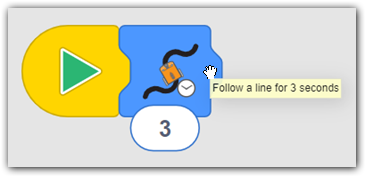
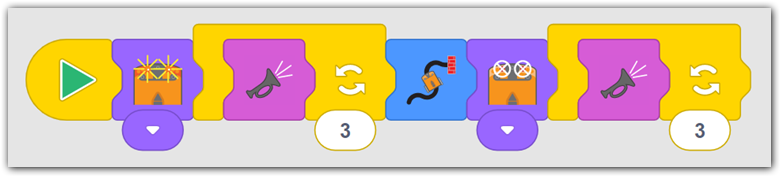
Με το πάτημα στο τρίγωνο κουμπί, το Edison κινείται στη μαύρη γραμμή για 3 δευτερόλεπτα. Με το πάτημα στο τρίγωνο κουμπί, το Edison ανάβει τα φώτα LEDs, ακούγεται για 3 φορές το Beep, κινείται στη μαύρη γραμμή μέχρι να συναντήσει ένα εμπόδιο, σβήνουν τα φώτα LEDs κι ακούγεται για 3 φορές το Beep.